Robtica
Redação do Site Inovação Tecnológica – 14/04/2025
Esses pequenos robs usam magnetismo para se mover e explorar espaos apertados, incluindo escombros de desastres ou o corpo humano.
[Imagem: Jennifer M. McCann/Penn State]
Robtica macia
Integrando eletrnica flexvel com geradores de movimento controlados magneticamente, engenheiros desenvolveram um rob minsculo, macio, flexvel e muito verstil, capaz, por exemplo, de rastejar pelos escombros de um terremoto ou outro acidente para procurar vtimas soterradas ou presas.
A robtica macia, diferentemente dos robs rgidos tradicionais, construda usando materiais flexveis, parecidos com os tecidos biolgicos, e projetada para imitar o movimento de organismos vivos. Essa flexibilidade a torna ideal para navegar em espaos apertados, como escombros em uma zona de desastre ou, com a devida miniaturizao, os intrincados caminhos no interior do corpo humano.
O avano conseguido agora por Sungkeun Han e colegas da Universidade Estadual da Pensilvnia, nos EUA, consistiu em fazer a difcil integrao dos sensores com a eletrnica, que permitem que os robs interajam ativamente com o ambiente, diminuindo a necessidade de um controle remoto.
“Queramos projetar um sistema em que a robtica flexvel e a eletrnica flexvel funcionassem juntas harmonicamente,” disse o professor Huanyu Cheng. “A eletrnica tradicional rgida, o que dificulta a integrao. Nossa soluo foi distribuir os componentes eletrnicos de forma a preservar a flexibilidade do rob, mantendo um desempenho robusto.”
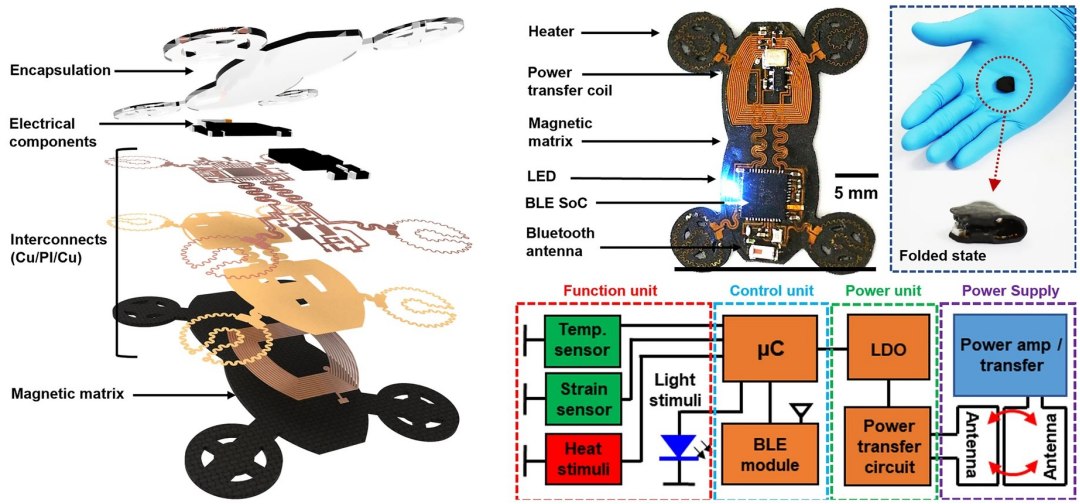
Esquema do rob no nvel inicial de miniaturizao.
[Imagem: Sungkeun Han et al. – 10.1007/s40820-024-01601-3]
Integrao e interferncias
Os robs se movem utilizando materiais magnticos rgidos embutidos em sua estrutura flexvel, o que lhes permite responder de modo previsvel a um campo magntico externo. Ajustando a intensidade e a direo do campo magntico, torna-se possvel controlar os movimentos dos robs, como se curvar, torcer ou rastejar, sem energia eltrica a bordo ou conexes fsicas, como fios.
Um grande obstculo no desenvolvimento dessa tecnologia foi descobrir como evitar que a eletrnica flexvel atrapalhasse o movimento do rob.
“Embora tenhamos projetado os componentes eletrnicos para serem flexveis, sua rigidez ainda centenas a milhares de vezes maior do que a do material robtico macio,” contou Cheng. “Para superar isso, distribumos os componentes eletrnicos pela estrutura, reduzindo seu impacto no movimento.”
Outro desafio consistiu em bloquear interferncias eltricas indesejadas, que podem interromper o funcionamento de um dispositivo ou sistema eletrnico. Essa interferncia vem de fontes externas, como outros eletrnicos ou sinais sem fio presentes no ambiente, mas tambm pode vir do prprio sistema de controle magntico. Para que o rob seja merecedor de confiana, necessrio se contrapor a essa interferncia.
“Campos magnticos so cruciais para controlar o movimento, mas tambm podem interromper sinais eletrnicos,” observou Cheng. “Tivemos que projetar cuidadosamente o leiaute eletrnico para minimizar essas interaes, garantindo que os sensores permanecessem funcionais mesmo na presena de fortes campos magnticos.”
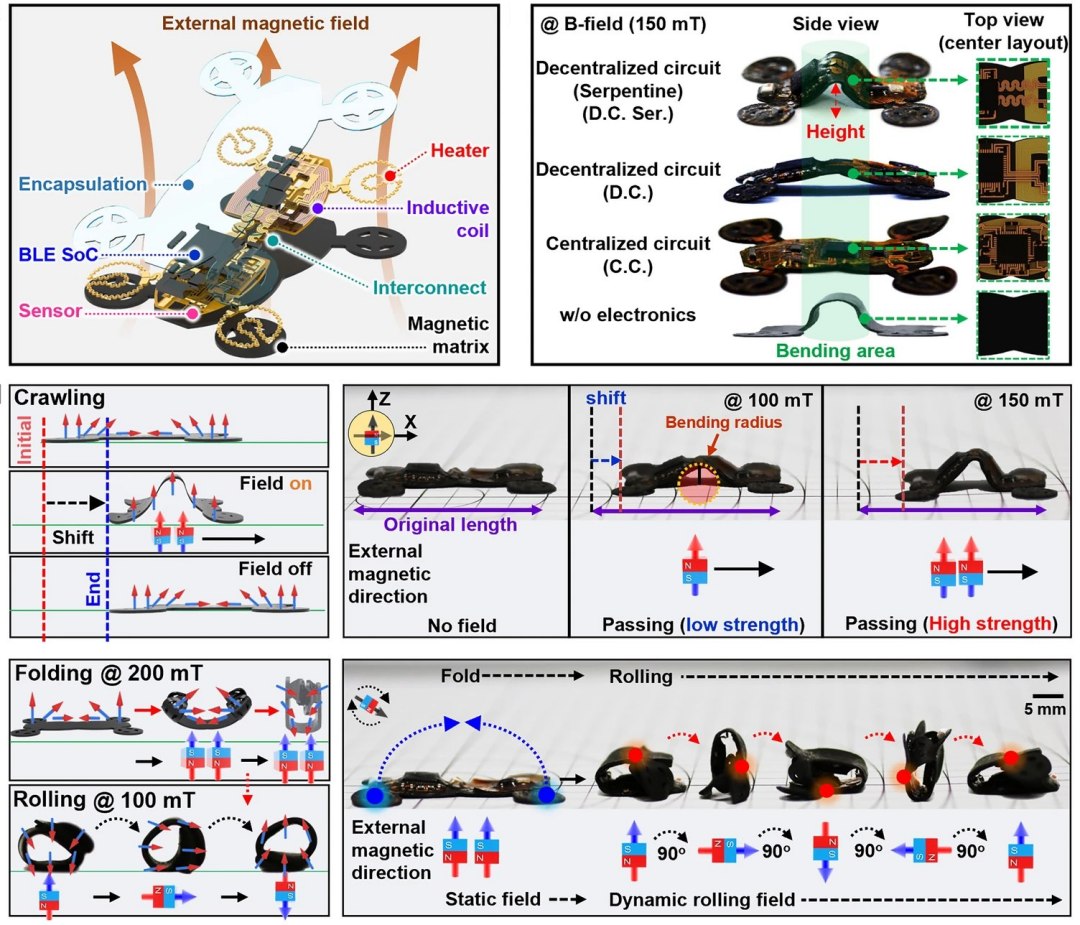
Demonstrao dos movimentos do rob macio.
[Imagem: Sungkeun Han et al. – 10.1007/s40820-024-01601-3]
Salvando vidas
Com a interferncia magntica minimizada, os robs podem ser guiados remotamente por meio de campos eletromagnticos, ou mesmo de ms portteis, o que limita a necessidade de interveno humana. Alm disso, sensores integrados permitem que eles reajam de forma autnoma a sinais ambientais.
Em aplicaes de busca e salvamento, por exemplo, os robs so inteligentes o suficiente para navegar entre detritos detectando calor ou obstculos. Em aplicaes mdicas, eles podero responder a mudanas de pH ou presso, garantindo a administrao precisa de medicamentos ou a coleta precisa de amostras.
“Uma das aplicaes potenciais mais fascinantes em dispositivos mdicos implantveis,” disse o professor Suk-Won Hwang, da Universidade da Coreia. “Estamos trabalhando na miniaturizao do sistema para torn-lo adequado para uso biomdico. Imagine um pequeno sistema robtico que possa ser engolido como uma plula, navegar pelo trato gastrointestinal e detectar doenas ou administrar medicamentos precisamente onde so necessrios.”
Artigo: Wireless, Multifunctional System-Integrated Programmable Soft Robot
Autores: Sungkeun Han, Jeong-Woong Shin, Joong Hoon Lee, Bowen Li, Gwan-Jin Ko, Tae-Min Jang, Ankan Dutta, Won Bae Han, Seung Min Yang, Dong-Je Kim, Heeseok Kang, Jun Hyeon Lim, Chan-Hwi Eom, So Jeong Choi, Huanyu Cheng, Suk-Won Hwang
Revista: Nano-Micro Letters
Vol.: 17, article number 152
DOI: 10.1007/s40820-024-01601-3

Outras notcias sobre:
Mais tópicos